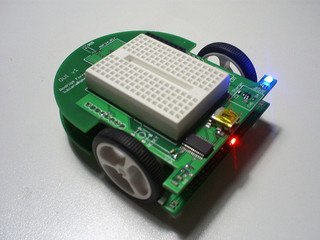
robotDuino es el cuarto gran proyecto en el que me embarco, después de un Arduino hecho a medida, un gamepad bluetooth que no llego a funcionar, y tres estaciones meteorológicas que aun tengo que terminar de programar.., llega robotDuino!
robotDuino es más pequeño que la palma de una mano, concretamente mide 90mm de largo, por 80mm de ancho, por 32mm de alto (aproximadamente).
Está basado en el GUI v2 de Forrequi, de él se ha aprovechado el chasis y algunos de los componentes, aunque no todos pues este robotDuino tiene como corazón un microcontrolador ATMEL en vez de un Microchip, por lo que es compatible con Arduino.


No solo permite funcionar como un sigue líneas o ser manejado inalámbricamente como el robot en el que se basa. Si no que también permite detectar objetos frontalmente, escapar de la luz como las cucarachas, detectar golpes, giros, etc.
Para ello cuenta con:
- 1 Procesador con 256KiB de memoria.
- 7 Sensores infrarrojos para funcionar como sigue líneas.
- 1 Sensor infrarrojo frontal para detectar objetos hasta 10cm de distancia.
- 2 Sensores infrarrojo para calcular la distancia recorrida. *
- 1 Sensor de luz para escapar de los focos/linternas.
- 1 Sensor para detectar la carga de la batería. *
- 1 Receptor infrarrojo para control con un mando a distancia.
- 1 Modulo Bluetooth para control con el móvil/pc.
- 1 Acelerómetro para detectar golpes.
- 1 Giróscopo para saber la dirección actual.
- 1 Brújula para saber la posición del Norte.
- 1 Lector de tarjetas para almacenar o leer datos.
- 1 LCD OLED gráfico para elegir el modo de funcionamiento del robot, o mostrar información.
- 1 Pad de 5 direcciones para desplazarse por los menús.
- 1 Buzzer para emitir sonidos.
- 2 Leds blancos frontales para iluminar.
- 2 Leds rojos para indicar la acción de frenar o de girar (funcionan independientemente)
- 1 Led RGB para mostrar el estado sin mirar la pantalla/menús.
* Por decidir si finalmente lo llevara o no.
En próximas entradas ampliare la información, aunque aquí he ido publicándola durante este ultimo mes. Y desde aquí esta disponible toda la documentación que voy recopilando.